# RTK NTRIP
### Why do we need RTK?
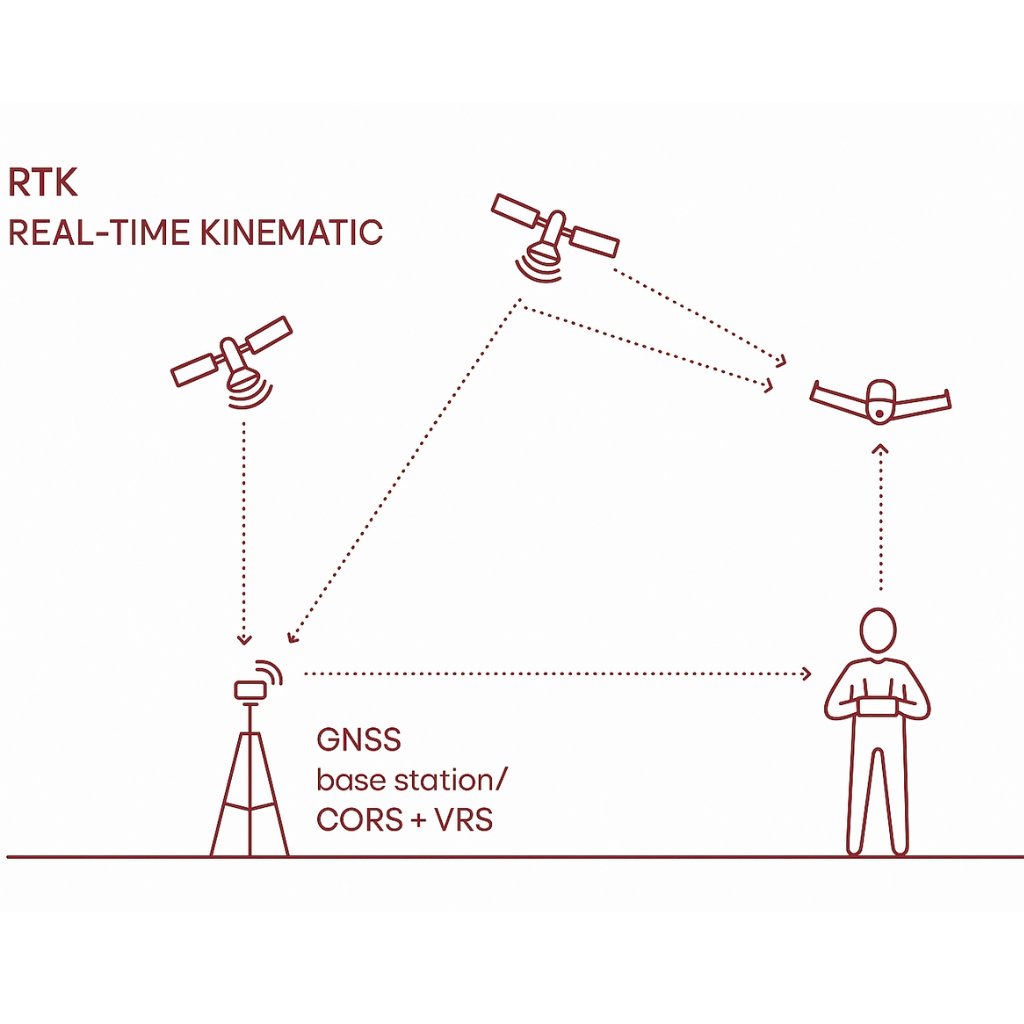
The standard GPS/GNSS is accurate to about 2 to 5 meters. which is fine for navigating a car on a highway, but this is **not good enough** for precise task lke landing a drone on a small pad, surveying, and autonomous farming. To fix this, we need to use RTK
RTK stand for Real-Time Kinematic, it **uses a stationary "Base Station"** to send correction stream to your drones. This help brings accuracy down to the centimeter level.
But here the catch, the **Base Station** that send these corrections streams is using raw radio links. And radios **require line-of-sight**, and their **operation range** is typically only a **few kilometers**.
This is where NTRIP comes to play.
### What is RTK NTRIP?
In a nutshell, instead of transmitting GPS correction stream from a Base Station via **local radio**, we transmit those messages using NTRIP which stand for Networked Transport of RTCM via **Internet Protocol**.
This would help you instead of relying on a localized radio setup, as long as your devices has internet connection it can receive RTK corrections from a base station anywhere in the world.
### How Does It Work?
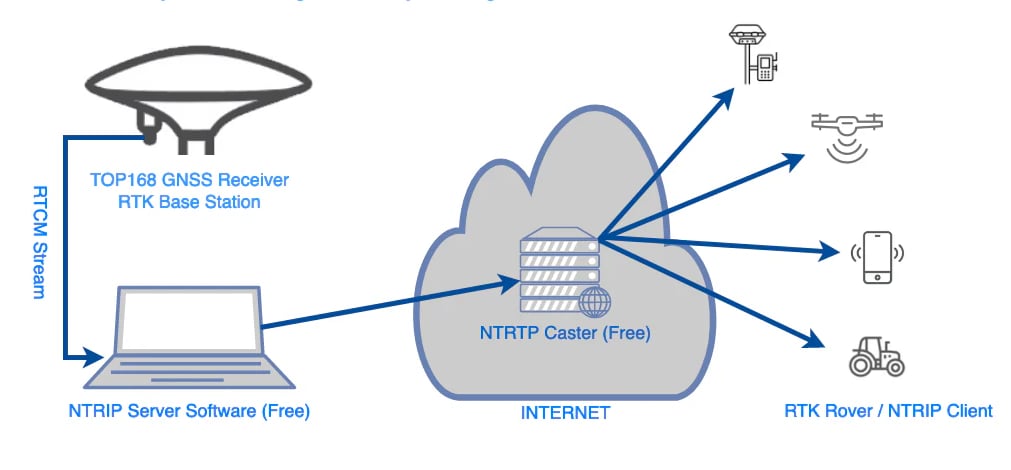
So NTRIP work like a standard client-server network architecture, with three main components
1. The NTRIP **server**: This is where the raw RTCM of the Base Station going to and being pushed over the internet to a central broadcasting hub.
2. The NTRIP **caster**: The central cloud server that manages user logins and organizes incoming base station streams into selectable channels called Mount Points.
3. The NTRIP **client**: The software on your device that connects to the Caster, selects a specific Mount Point, and downloads the corrections.
Because of this, you don't have to own a RTK hardware setup at home, you can simply act as the NTRIP Client.
To do this, you subscribe to a professional CORS network service (like **HxGN SmartNet**). Once approved, the service provider acts as the Caster and will provide you with the four specific pieces of information your client needs to connect:
1. **Host/URL**: The IP address or URL of the provider's Caster
2. **Port**: The network port used for the data stream
3. **Mount Point**: The specific correction stream channel for your local area.
4. **Account**: Your unique **username** and **password** to authenticate your access.
### Setting RTK NTRIP on XBLINK
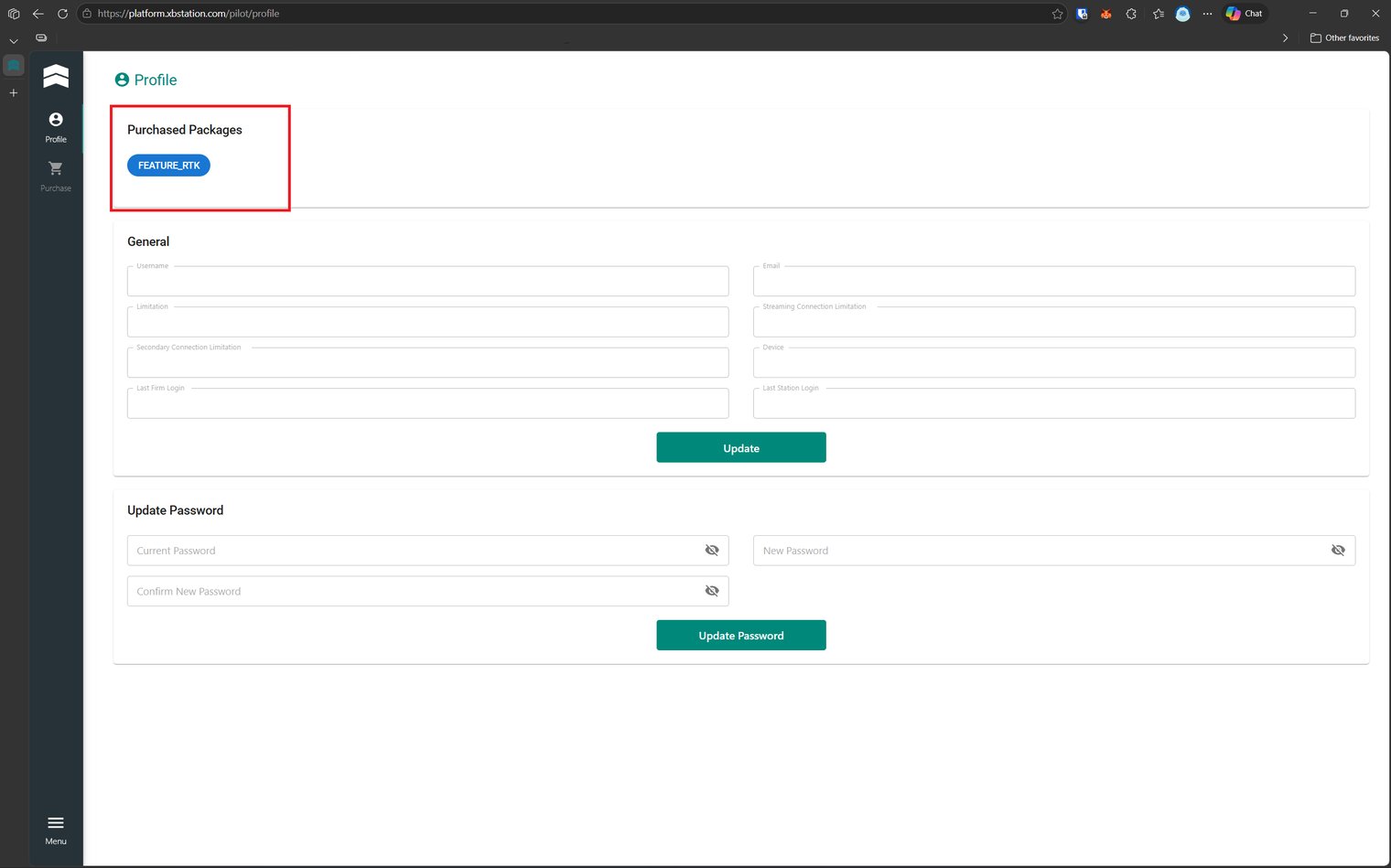
First of all, make sure you have purchase our NTRIP package in order to enable the feature. If you have not purchase, please refer to our [**Payment**](broken://pages/qDA18HKJE4y35C2YSNnF) section for detailed guide.
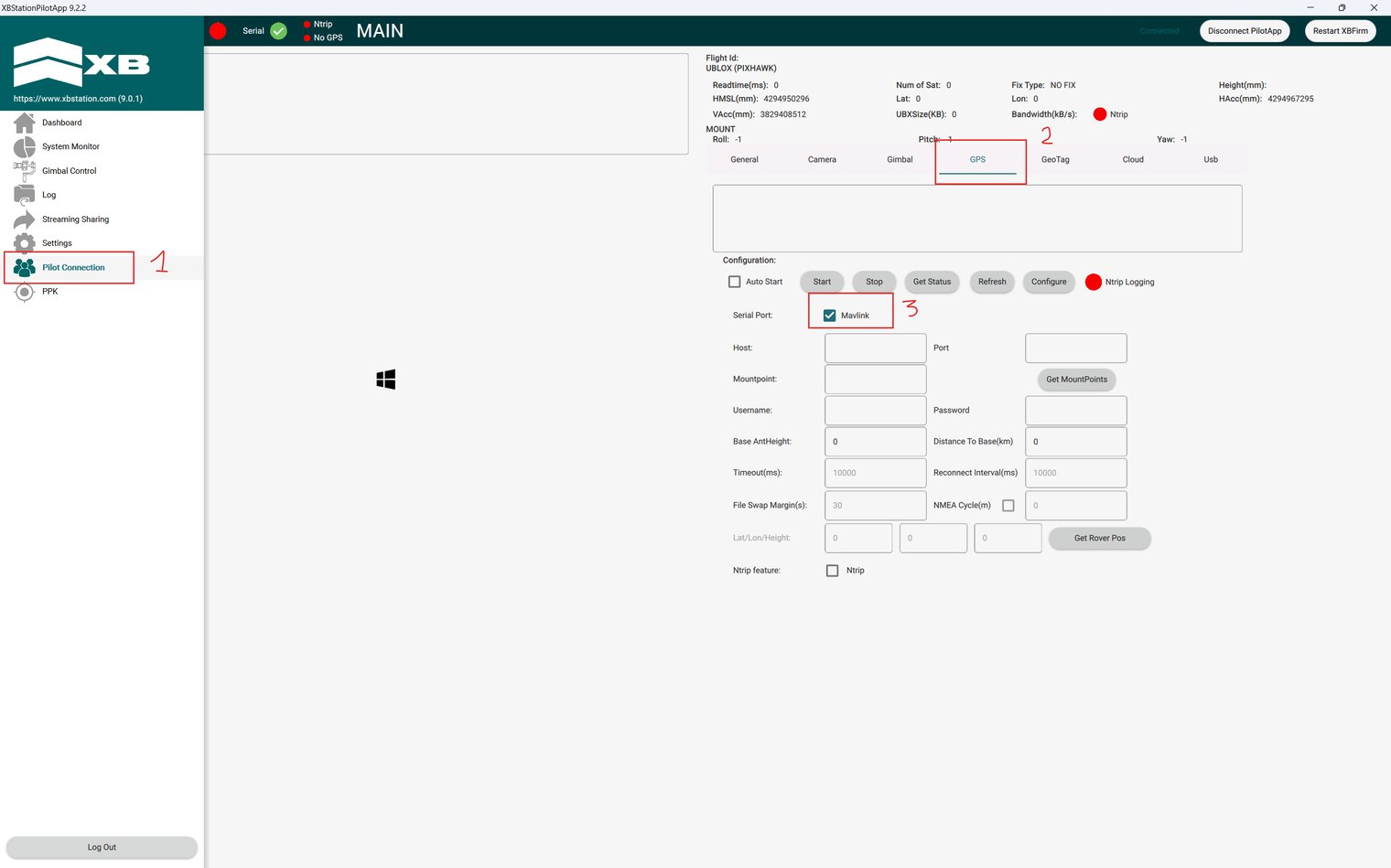
After you have verified that the feature is active via [**Pilot Website**](https://platform.xbstation.com/pilot/login)**,** open the PilotApp, login and click on the **Hamburger icon** on the top left corner to open the menu, then click on **Pilot Connection ⇒ GPS ⇒** Tick the **MAVLink** box ⇒ Tick the **Ntrip** at NTrip feature, you are ready to enter all the necessary information to enable NTRIP
The next step would be to fill all the blank box with information that the RTK NTRIP service provider gave you, if they gave you an URL, it structure is as follow, [http://user:pass@host:port/mount](https://docs.xbstation.com/xblink-4g-r2/user-manual/advanced-configuration/cloud-features/http:/user:pass@host:port/mount).
Click **Configure** to save the infomation that you have fill, then simply click **Start**
If the red dot at NTrip turned green then congratulation, you have successfully enable RTK NTrip for you drone. Take your drone for a ride to see a clear different.
### Video Tutorial and Result
Here you can see a tutorial on how to setup the RTK NTrip for you XBLink, and Real-life demo.
---
# Agent Instructions: Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://docs.xbstation.com/xblink-4g-r2/user-manual/advanced-configuration/cloud-features/ntrip.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.